🔀 Fast Deep RL on GPU: Adding Multi-Discrete Actions to RSL-RL Library
TL;DR: How I extended the RSL-RL library to support multi-discrete action spaces while keeping continuous control fully intact. Benchmarks show RSL-RL matches Stable Baselines 3 in performance on both tasks and runs faster thanks to full GPU execution. This makes RSL-RL a versatile, high-speed option for robotics, scheduling, and other decision-making problems.
Introduction
RSL-RL is a compact, GPU-native reinforcement learning library from the legged robotics community that prioritizes speed and simplicity. Its design, clean PPO implementation, minimal boilerplate, and an end-to-end GPU pipeline, makes it a great fit for high-throughput continuous-control tasks like robotic locomotion.
However, many real-world decision problems aren’t purely continuous. Scheduling, routing, and structured control often require multi-discrete action spaces (e.g., choose one option in each of several independent branches). Out of the box, RSL-RL only supported continuous actions, which limited its applicability beyond typical robotics control.
My goal in this project was straightforward: add first-class support for multi-discrete actions while preserving everything that makes RSL-RL appealing, its GPU-first speed and its clean developer experience. Concretely, I wanted to:
- Extend the actor-critic and rollout storage to handle multi-discrete distributions without breaking existing continuous workloads.
- Keep the API changes minimal and intuitive.
- Validate the implementation on both fronts: a continuous robotics benchmark and a multi-discrete optimization task, checking for performance parity with Stable Baselines 3 and ensuring no regressions in continuous control.
Why Multi-Discrete Action Spaces Matter
In reinforcement learning, action spaces define the kind of decisions an agent can make. While continuous actions (like joint torques in robotics) and single-discrete actions (like moving left or right in a game) cover many cases, they aren’t always enough.
A multi-discrete action space is essentially a set of independent categorical choices made at the same time. Instead of choosing just one action, the agent selects one option per branch.
For example:
- Maintenance scheduling: for each machine, decide whether to service it this cycle or not.
- Resource allocation: distribute different resource types (CPU, bandwidth, storage) across competing tasks.
These problems don’t map cleanly to a continuous action space, multi-discrete actions are the natural fit.
By adding this capability, RSL-RL is no longer confined to robotics-style continuous control. It can now be applied to optimization problems, scheduling tasks, and decision-making domains that were previously better handled by other libraries like Stable Baselines 3. And because RSL-RL runs entirely on GPU, it can bring significant speedups in wall-clock training time to these new problem classes.
Implementation Details
The core of this project was extending the RSL-RL codebase to natively support multi-discrete actions while keeping continuous control fully functional. You can see all the modifications in my commit here.
Here’s a high-level overview of the changes:
Actor-Critic Module. The
ActorCriticclass was refactored to handle both continuous and multi-discrete distributions. For continuous actions, it still outputs mean and standard deviation vectors. For multi-discrete actions, it now outputs concatenated logits per branch and manages sampling, evaluation, and log-probability calculations appropriately. This allows PPO and other algorithms to work seamlessly with either action type.Rollout Storage. Rollout storage was adapted to store logits for multi-discrete actions instead of continuous action vectors. This includes modifications to
add_transitionsand mini-batch generators to maintain a uniform interface for both types of action spaces. The storage still resides fully on GPU for maximum speed.PPO Runner. The on-policy runner was updated to correctly initialize the algorithm with the proper shapes for multi-discrete actions. It now dynamically handles action type selection from the environment configuration without breaking the continuous action workflow.
Key Points:
- The implementation maintains full GPU execution, no matter if actions are continuous or multi-discrete.
- Continuous action benchmarks remain unaffected, ensuring no regressions.
- The API changes are minimal, keeping the library intuitive and easy to use.
These updates make RSL-RL more versatile, opening the door to a broader class of reinforcement learning problems without sacrificing speed or simplicity.
Testing Setup
To validate the new multi-discrete support and ensure no regressions on continuous tasks, I set up two benchmarks:
Multi-Discrete Control: Maintenance Scheduling Optimization
- Environment: Custom maintenance scheduling optimization problem, where the agent decides which machine to service at each timestep, for 1 year simulation.
- Action Space: Multi-discrete choice.
- Goal: Test the correctness and efficiency of multi-discrete support in RSL-RL.
- Validation: Compared performance and training curves with SB3’s multi-discrete PPO implementation.
Continuous Control: Unitree Go2 Locomotion
- Environment: Genesis simulator with a Unitree Go2 quadruped robot.
- Action Space: Fully continuous robot controls.
- Goal: Evaluate if the modified RSL-RL still matches or exceeds baseline performance in standard continuous locomotion tasks.
- Validation: Compared training curves with original RSL-RL library results and evaluation runs with Stable Baselines 3 (SB3) using PPO.
Both benchmarks were run fully on GPU, ensuring that the new multi-discrete implementation leveraged RSL-RL’s GPU-first design.
This dual setup allows for direct comparison: checking that continuous control remains stable while assessing the effectiveness of the new multi-discrete capabilities.
Results
The updated RSL-RL library was benchmarked on both multi-discrete and continuous tasks. Here’s what we observed:
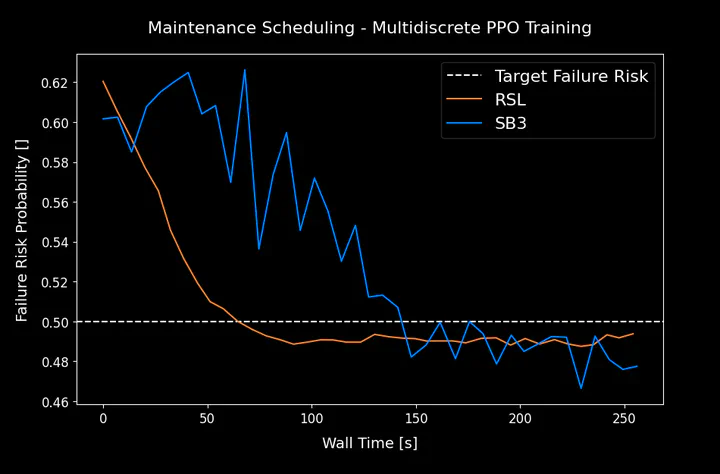
Multi-Discrete Control

Multi-discrete action space training curves comparison, RSL vs SB3.
Training Curves: RSL-RL converges at a similar pace and final performance as Stable Baselines 3 (SB3) on the maintenance scheduling task.
Evaluation: The agent reliably generates high-quality schedules, satisfying constraints and optimizing the objective.

Optimal maintenance scheduling for failure risk minimization.
Key Takeaway: RSL-RL now handles multi-discrete actions effectively, achieving parity with SB3 in solution quality while maintaining GPU execution.
Continuous Control

Continuous action space training curves comparison, RSL vs SB3.
Learning Curves: RSL-RL continues to match SB3’s performance on the Unitree Go2 locomotion benchmark.
Evaluation: Videos and GIFs of the robot show stable and natural walking gaits, with no observable regressions from the original RSL-RL implementation.
 |  |
| Trained Model Evaluation - RSL | Trained Model Evaluation - SB3 |
Key Takeaway: The multi-discrete modifications do not compromise continuous control, preserving the library’s original capabilities.
Speed
Wall-Time Comparison: Across both tasks, RSL-RL exhibits faster convergence in terms of wall-clock time due to its fully GPU-native implementation.
Impact: Users can experiment with both continuous and multi-discrete tasks significantly faster than other solutions like SB3, making this extension a valid and practical alternative for high-throughput RL research and rapid prototyping.
The results confirm that RSL-RL is now a flexible and high-performance platform capable of tackling a broader range of RL problems without sacrificing speed or reliability.
References
- 👨🏽💻 GitHub Code: https://github.com/alexpalms/discrete_rsl_rl